


Vor der physischen Inbetriebnahme lassen sich Anlagen und Roboter in einer digitalen Umgebung kurzfristig simulieren. Mit RoboDK inklusive kostenloser Webversion erfolgen Tests von Steuerungslogiken offline im Browser. Dadurch treten teure Stillstandszeiten bei der Montage nicht mehr auf und Fehler werden bereits im Vorfeld identifiziert. Die virtuelle Inbetriebnahme senkt Kosten und minimiert Nacharbeiten. Die im CoRo-Labor der ETS University in Montreal entwickelte Software kommt bei über 50.000 Nutzern weltweit zum Einsatz.
Inhaltsverzeichnis: Das erwartet Sie in diesem Artikel
Frühe Fehlererkennung durch virtuelle Inbetriebnahme in realitätsnaher digitaler Umgebung
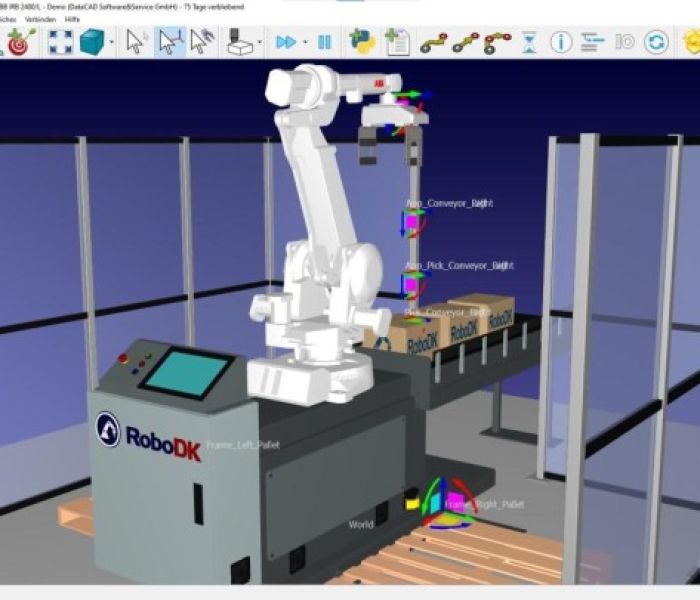
Effizient sparen mit RoboDK in der virtuellen Inbetriebnahme (Foto: DataCAD Software und Service GmbH)
Bei der virtuellen Inbetriebnahme werden Maschinen, Anlagen und Robotersysteme mittels Softwaretools digital nachgebildet, um Steuerungsstrategien, Ablaufsequenzen und Bewegungsbahnen vorab zu prüfen. Alle relevanten Funktionen lassen sich isoliert simulieren, wodurch Anwender bereits in der Planungsphase Optimierungen durchführen und Schwachstellen wie Kollisionen, Zyklusüberlängen oder Signalverzögerungen identifizieren. Durch dieses Vorgehen verkürzen sich physische Inbetriebnahmephasen, Fehlkosten werden reduziert und Projektcontrolling sowie Qualitätssicherung gewinnen an Präzision und Transparenz. Frühzeitiges Testing steigert Effizienz nachhaltig und Planungssicherheit.
Steigende Personalkosten erfordern virtuelle Inbetriebnahme für effiziente, wirtschaftliche Prozessoptimierung
Angesichts steigender Lohnkosten, komplexer Maschinenparks und verschärfter Qualitätsanforderungen wird eine ganzheitliche Optimierung industrieller Abläufe unerlässlich. Mit virtueller Inbetriebnahme lassen sich Steuerungslogiken, Bewegungsabläufe und Sicherheitsfunktionen bereits vor dem physischen Aufbau eingehend simulieren und anpassen. Das verringert Iterationsschleifen, reduziert Personaleinsatz vor Ort und beschleunigt Inbetriebnahmezyklen. Projektteams gewinnen dadurch zeitliche Flexibilität, können Abstimmungsschleifen effektiver gestalten und Einsparpotenziale in der Planungsphase frühzeitig identifizieren. Diese Strategie sichert fachlich termingerechte Produktionsstarts sowie gesteigerte Ressourceneffizienz nachhaltig ab.
Über 1200 Roboterarme verschiedener Hersteller offline planen und simulieren

Effizient sparen mit RoboDK in der virtuellen Inbetriebnahme (Foto: DataCAD Software und Service GmbH)
Mit RoboDK lassen sich Roboterbewegungen und Greiferwechsel vorab in einer digitalisierten Umgebung konfigurieren, ohne dass physische Geräte benötigt werden. Neben realistischen 3D-Simulationen unterstützt die Software Kinematiken und komplexe Pfadplanungen. Über 1.200 Modelle von mehr als 80 Herstellern sind bereits integriert und ermöglichen eine reibungslose Migration optimierter Programme in die reale Steuerung. Diese Vorverlagerung der Softwareentwicklung verringert Stillstandskosten, verkürzt Inbetriebnahmezeiten und erhöht die Zuverlässigkeit industrieller Automationsprojekte spürbar, effizient und nachhaltig.
Kollisionen und Engstellen identifizieren bevor Inbetriebnahme teure Verzögerungen verursacht
RoboDK ermöglicht eine unabhängige Simulation von Roboterabläufen abseits der eigentlichen Produktionslinie, wodurch Programme schon vor der realen Installation getestet und optimiert werden. Dabei werden Kollisionen, räumliche Einschränkungen sowie ineffiziente Bewegungsabläufe bereits in der Planungsphase sichtbar. Dies reduziert Stillstandszeiten erheblich und senkt den Aufwand für Nacharbeiten. Als Ergebnis lassen sich Projektlaufzeiten deutlich verkürzen und die Anlagenverfügbarkeit nachhaltig steigern, wodurch eine höhere Effizienz und Wirtschaftlichkeit erreicht werden. Parallel steigert die virtuelle Inbetriebnahme die Planungsgenauigkeit und minimiert somit Kosten- und Terminrisiken in allen Projektphasen.
Anlagen profitieren von RoboDK-Simulation für frühzeitige Fehlererkennung und Effizienz
Durch den gezielten Einsatz der virtuellen Inbetriebnahme mit RoboDK lassen sich Inbetriebnahmezeiten signifikant reduzieren und Nacharbeitsschleifen minimieren. Die Simulation komplexer Anlagenkonfigurationen und mehrerer Roboterstationen ermöglicht frühzeitiges Erkennen von Programmierfehlern, Engstellen und Kollisionen. Prüfungen an digitalen Modellen beschleunigen Abstimmungsprozesse zwischen Projektbeteiligten und schaffen klare Voraussetzungen für eine reibungsarme Integration vor Ort, sodass die getätigten Investitionen sich bereits in den anfänglichen Projektphasen durch geringere Prozesskosten amortisieren. Optimierte Workflows steigern zudem Wettbewerbsfähigkeit nachhaltig.
Intuitive RoboDK Weboberfläche ermöglicht globalen Simulationsüberblick ohne lokale Installation
RoboDK Web bringt die Offline-Programmierung von Robotern ins Browser-Zeitalter und erfordert keine lokale Softwareinstallation. Anwender können schnell Prototypen simulieren, einfache Bewegungsabläufe testen und verschiedenste Konfigurationen ausprobieren. Die benutzerfreundliche Oberfläche führt Schritt für Schritt durch das Setup und visualisiert Ergebnisse unmittelbar. Dadurch werden Entwicklungszeiten verkürzt und Fehler frühzeitig erkannt. Einsteiger und Gelegenheitsnutzer erhalten durch klare Strukturen und Hilfetexte direkten Zugang zu leistungsstarken Funktionen ohne Einarbeitungsbarrieren und fördern agile Teamarbeit im Maschinenbau.
Nahtloser Export digitaler Projekte von Webversion in RoboDK Professional
Über die Weboberfläche lassen sich gängige 3D-Modelldateien und Bearbeitungsformate wie STEP, IGES, G-Code, APT und ergänzende Typen direkt laden. Anwender profitieren von plattformunabhängiger Vorbereitung und Simulation, bevor sie ihre Modellsätze reibungslos in die Desktop-Software RoboDK Professional transferieren. In der vollwertigen Anwendung stehen erweiterte Analyse-, Optimierungs- und Kollisionsprüfungsfunktionen sowie detaillierte Statistiken zur Verfügung, damit die Offline-Programmierung in anspruchsvollen Robotikprojekten präzise, effizient und skalierbar umgesetzt werden kann. Einfache und sichere Datenübertragung gewährleistet.
000 Anwender weltweit setzen RoboDK für effiziente Offline-Roboterprogrammierung ein
Eine einzelne RoboDK-Lizenz ermöglicht die Offline-Programmierung beliebig vieler Roboter unterschiedlicher Hersteller und Modelle. Bereits über 50.000 Fachanwender in mehr als 50 Ländern schätzen die Stabilität dieser Automatisierungsplattform. Für einen einmaligen Preis von 3.995 ? erhalten Sie weltweit eine unbefristete Lizenz inklusive ausführlicher Online-Dokumentation, praxisorientierter Trainingsunterlagen und eines fünfstufigen Schnellstart-Leitfadens. Die Lösung läuft nativ auf Windows, macOS und Ubuntu, ist vollständig kompatibel mit Raspberry Pi und mobil verfügbar für Android sowie iOS.
Albert Nubiolas RoboDK-Spinoff entsteht 2015 am CoRo-Labor der ETS
Seit ihrer Gründung im Januar 2015 durch Albert Nubiola als Ausgliederung des CoRo-Labors der ETS University Montreal hat sich RoboDK rasant weiterentwickelt. Aus einem Startangebot für etwa 200 Roboter unterschiedlicher Hersteller entstand eine umfassende Softwareplattform. Heute integriert RoboDK über 1.200 Robotermodelle von mehr als 80 Anbietern und bedient sowohl Forschungsprojekte als auch industrielle Anwendungen. Die anwenderfreundliche Offline-Programmierung wird inzwischen ebenso von kleinen Unternehmen wie von globalen Konzernen für effiziente Automatisierungslösungen genutzt.
Durch die Integration virtueller Inbetriebnahme und Tools wie RoboDK lassen sich Roboterprogramme detailliert in einer 3D-Simulationsumgebung entwickeln und validieren. Anwender können komplexe Bewegungsabläufe, Greiferschnittstellen und Steuerungslogiken testen, ohne die reale Anlage zu blockieren. Fehler und Kollisionen werden früh erkannt, wodurch Stillstandszeiten reduziert und Kosten für Nacharbeiten gesenkt werden. Die kostenlose Webversion erweitert den Zugang für Anwender aller Erfahrungsstufen und ermöglicht den schnellen, direkten und unkomplizierten Einstieg in Offline-Programmierung und Simulation.











